Capteurs
Saisies
Le démarrage de chaque bloc
Le démarrage de chaque bloc permet d’exécuter un programme si une condition est remplie. Il fonctionne donc comme une distinction de cas, non seulement une fois, mais chaque fois que la condition est remplie, tout au long du programme. Le démarrage de chaque bloc :

Est une abréviation de la construction suivante :
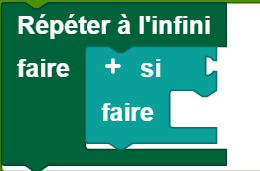
On peut insérer dans le Démarrage de chaque bloc de la catégorie Saisies toutes les conditions de cette même catégorie.
Remarque : La section du programme à l’intérieur du démarrage de chaque bloc doit être courte et ne pas comporter d’appels bloqués ou de boucles de fin de session, afin que cette partie du programme puisse être traitée rapidement.
Touche de palpage
La touche de palpage est un capteur numérique qui distingue les états « Le courant circule » et « Le courant ne circule pas ». Le flux de courant dépend à la fois du câblage et du fait que la touche de palpage soit enfoncée. On peut donc utiliser le bouton de deux façons différentes :
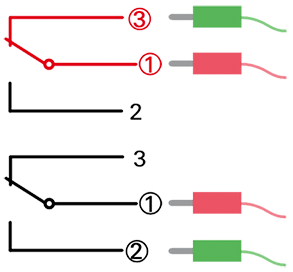
Comme « fermeture » :
les contacts 1 et 3 sont raccordés.
Touche de palpage enfoncée : Le courant circule. Touche de palpage non enfoncée : Le courant ne circule pas
Les contacts 1 et 2 sont raccordés.
Touche de palpage enfoncée : Le courant ne circule pas. Touche de palpage non enfoncée : Le courant circule.
Afficher
Avec Récupérer le statut de la mini touche de palpage, on obtient des informations sur le fait que du courant circule dans la touche de palpage ou non. Si du courant circule, le signal 1 est retourné, en l’absence de courant, le signal est de 0.
Interroger
Pour vérifier si le bouton est dans un état donné, le bloc Bouton … est utilisé. Le menu déroulant (petit triangle) permet d’indiquer l'état interrogé. Ce bloc peut être utilisé comme une condition.
Capteur à ultrasons

Le capteur à ultrasons est utilisé pour mesurer des distances.
Afficher
Avec Récupérer la distance du capteur à ultrasons, on obtient des informations sur la distance entre le capteur et l’objet le plus proche. La distance est retournée en cm.
Interroger
Pour déterminer si le capteur est situé à une certaine distance de l'objet le plus proche, le bloc Distance du capteur à ultrasons … est utilisé. Le menu déroulant (petit triangle) permet de sélectionner comment comparer la distance mesurée à une valeur saisie (<, ≤, =, ≠, ≥, >). La valeur de comparaison est saisie dans le champ numérique à la fin du bloc. Ce bloc peut être utilisé comme une condition. Dans l’exemple, le moteur est arrêté lorsque la distance mesurée est inférieure à 2 cm.

Capteur de couleurs
Le capteur de couleur émet de la lumière rouge et mesure la quantité de lumière réfléchie. En fonction de l’intensité de la réflexion, le capteur de couleur renvoie des valeurs de 0 à 2000. Il convient parfaitement pour reconnaître les couleurs préalablement calibrées.
Afficher
La fonction Récupérer la valeur du capteur de couleur permet d’obtenir des informations sur l’intensité de réflexion de la lumière par une surface.
Interroger
Pour déterminer si le capteur a une certaine couleur devant lui, le bloc Valeur du capteur de couleurs … est utilisé. Le menu déroulant (petit triangle) permet de sélectionner comment comparer la valeur de couleur mesurée à une valeur saisie (<, ≤, =, ≠, ≥, >). La valeur de comparaison est saisie dans le champ numérique à la fin du bloc. Ce bloc peut être utilisé comme une condition. Dans l’exemple, le moteur est arrêté lorsque la valeur de couleur mesurée est inférieure à 1000.

Détecteur de piste infrarouge

Le détecteur de piste infrarouge est un détecteur numérique qui détecte une piste noire sur un fond blanc et qui fonctionne à une distance de 5 à 30 mm d’un capteur à l’autre.
Afficher
Avec Récupérer le statut du détecteur de piste infrarouge on obtient 0 si le capteur ne détecte pas de piste. Si le capteur détecte une piste, 1 est retourné.
Interroger
Pour savoir si le détecteur de piste infrarouge détecte une piste, il faut comparer l’état actuel de la piste à 0 ou 1. Le bloc Statut du détecteur de piste infrarouge [] ... convient pour cela . Le menu déroulant (petit triangle) permet de sélectionner comment comparer la valeur de piste mesurée à une valeur saisie (<, ≤, =, ≠, ≥, >). La valeur de comparaison est saisie dans le champ numérique à la fin du bloc. Ce bloc peut être utilisé comme une condition. Dans l’exemple, le moteur est arrêté lorsque la valeur de piste est à 0.

Phototransistor

Le phototransistor est un capteur numérique qui distingue le clair du foncé.
Afficher
Avec Récupérer le statut du phototransistor on obtient 0 si le capteur ne détecte pas de lumière. Si le capteur détecte une lumière, 1 est retourné..
Interroger
Pour savoir si le phototransistor détecte du clair ou du foncé, il faut comparer l’état de luminosité à 0 ou 1. Le bloc Statut du phototransistor []. convient pour cela Le menu déroulant (petit triangle) permet de spécifier s'il faut interroger le clair ou le foncé.

Une utilisation possible d'un phototransistor est une barrière lumineuse, comme ce modèle.
Photorésistance

La résistance de la photorésistance diminue si elle est exposée à une luminosité plus importante. La valeur de la photorésistance est donc une mesure de la luminosité.
Afficher
La fonction Récupérer la valeur de la photorésistance permet de savoir à quel point la luminosité est importante. Plus la valeur émise est faible, plus elle est claire.
Interroger
Pour savoir si la photorésistance mesure une valeur de luminosité spécifique, le bloc Valeur de photorésistance [] ... est utilisé. Le menu déroulant (petit triangle) permet de sélectionner comment comparer la valeur de luminosité avec la valeur saisie (<, ≤, =, ≠, ≥, >). La valeur de comparaison est saisie dans le champ numérique à la fin du bloc. Ce bloc peut être utilisé comme une condition. Dans l’exemple, le moteur est arrêté lorsque la valeur de luminosité mesurée est inférieure à 3000.

Résistance NTC
La résistance NTC est un capteur de température non binaire. Sa résistance électrique diminue lorsque la température augmente, ce qui en fait une mesure de la température.
Afficher
La fonction Récupérer la résistance NTC [] permet d’obtenir une valeur de résistance ou la température déduite. Vous pouvez sélectionner ce qui doit être retourné en utilisant le menu déroulant (petit triangle).
Interroger
Pour savoir si la résistance NTC mesure une certaine valeur, le bloc Résistance NTC [] [] ... est utilisé Les menus déroulants (petit triangle) permettent de sélectionner ce que vous souhaitez comparer et avec quel opérateur de comparaison. La valeur de comparaison est saisie dans le champ numérique à la fin du bloc. Ce bloc peut être utilisé comme une condition. Dans l’exemple, le moteur est arrêté lorsque la température est inférieure à 20.

Compteur

Le moteur encodeur peut être utilisécomme compteur. Le nombre de tours est compté, non seulement lorsqu’il tourne en tant que moteur, mais aussi lorsqu’il est entraîné mécaniquement de l’extérieur.
Le démarrage de chaque bloc
Le démarrage de chaque bloc permet d’exécuter un programme si une condition est remplie. Il fonctionne donc comme une distinction de cas, non seulement une fois, mais chaque fois que la condition est remplie, tout au long du programme. Le démarrage de chaque bloc :

Est une abréviation de la construction suivante :
On peut insérer dans le démarrage chaque bloc de la catégorie Compteur toutes les conditions de cette même catégorie.
Remarque : La section du programme à l’intérieur du démarrage de chaque bloc doit être courte et ne pas comporter d’appels bloqués ou de boucles de fin de session, afin que cette partie du programme puisse être traitée rapidement.
Afficher
La fonction Récupérer la valeur du compteur permet d’obtenir la valeur comptée par le compteur.
Interroger
Pour vérifier si le compteur a compté une certaine valeur, ce bloc est
![]()
utilisé. Le menu déroulant (petit triangle) permet de sélectionner comment comparer la valeur comptée à une valeur saisie (<, ≤, =, ≠, ≥, >).
Réinitialiser
Le compteur recommence à zéro lorsque le bloc Réinitialiser le compteur est exécuté.
I2C
Les capteurs I2C décrits dans ce chapitre sont reliés au contrôleur TXT 4.0 par un câble plat approprié.
Le démarrage de chaque bloc
Le démarrage de chaque bloc permet d’exécuter un programme si une condition est remplie. Il fonctionne donc comme une distinction de cas, non seulement une fois, mais chaque fois que la condition est remplie, tout au long du programme. Le démarrage de chaque bloc :

Est une abréviation de la construction suivante :
On peut insérer dans le démarrage chaque bloc de la catégorie I2C toutes les conditions de cette même catégorie.
Remarque : La section du programme à l’intérieur du démarrage de chaque bloc doit être courte et ne pas comporter d’appels bloqués ou de boucles de fin de session, afin que cette partie du programme puisse être traitée rapidement.
Capteur combiné

Le capteur combiné combine trois fonctions en un seul élément : le capteur d’accélération, le gyroscope et le capteur de compas.
Capteur d’accélération
Afficher
La fonction Récupérer l'accélération du capteur combiné dans [] permet d'obtenir l’accélération dans les directions. La direction souhaitée peut être sélectionnée dans le menu déroulant (petit triangle). L’accélération est indiquée en g.
Interroger
Pour savoir si l’on mesure une certaine accélération, le bloc Capteur combinéAccélération dans [] [] ... est utilisé. Les menus déroulants (petit triangle) permettent de sélectionner la manière de comparer l’accélération à la valeur saisie (<, ≤, =, ≠, ≥, >), ainsi que la direction à explorer. La valeur de comparaison est saisie dans le champ numérique à la fin du bloc. Ce bloc peut être utilisé comme une condition. Dans l’exemple, le moteur est arrêté lorsque l'accélération dans la direction x est supérieure à 10.

Gyroscope
Afficher
La fonction Récupérer la rotation du capteur combiné dans [] permet d'obtenir la rotation dans une direction. La direction souhaitée peut être sélectionnée dans le menu déroulant (petit triangle). La rotation est indiquée en °/s.
Interroger
Pour savoir si l’on mesure une certaine vitesse d'angle, le bloc Capteur combinéRotation dans [] [] ... est utilisé. Les menus déroulants (petit triangle) permettent de sélectionner la manière de comparer la rotation à la valeur saisie (<, ≤, =, ≠, ≥, >), ainsi que la direction à explorer. La valeur de comparaison est saisie dans le champ numérique à la fin du bloc. Ce bloc peut être utilisé comme une condition. Dans l’exemple, le moteur est arrêté lorsque la rotation dans la direction x est supérieure à 10.

Capteur à compas
Afficher
La fonction Récupérer le flux magnétique du capteur combiné dans [] permet d'obtenir le flux magnétique dans une direction. La direction souhaitée peut être sélectionnée dans le menu déroulant (petit triangle). Le flux magnétique est indiqué en μT.
Interroger
Pour savoir si l’on mesure un certain flux magnétique, le bloc Capteur combiné Flux magnétiquedans [] [] ... est utilisé. Les menus déroulants (petit triangle) permettent de sélectionner la manière de comparer le flux magnétique à la valeur saisie (<, ≤, =, ≠, ≥, >), ainsi que la direction à explorer. La valeur de comparaison est saisie dans le champ numérique à la fin du bloc. Ce bloc peut être utilisé comme une condition. Dans l’exemple, le moteur est arrêté lorsque le flux magnétique dans la direction x est supérieure à 10.

Capteur environnemental

Le capteur environnemental combine en un seul élément les quatre fonctions suivantes : capteur de qualité de l’air, capteur d’humidité de l’air, baromètre et thermomètre.
Capteur de la qualité de l'air
Afficher
Avec le bloc Récupérer la qualité de l’air du capteur environnemental comme [] , on peut mesurer la qualité de l’air. Le menu déroulant (petit triangle) permet de choisir si la qualité de l’air doit être restituée en tant que valeur numérique (de 0 à 500) ou en tant que texte.
Interroger
Pour savoir si l’on mesure une certaine qualité de l'air, le bloc Capteur environnemental qualité de l'air[] ... est utilisé. Le menu déroulant (petit triangle) permet de sélectionner comment comparer la qualité de l’air à la valeur saisie (<, ≤, =, ≠, ≥, >). La valeur de comparaison est saisie dans le champ numérique à la fin du bloc. Ce bloc peut être utilisé comme une condition. Dans l’exemple, le moteur est arrêté lorsque la qualité de l'air est supérieure à 10.

Baromètre
Afficher
Avec le bloc Récupérer la pression de l’air du capteur environnemental, on peut mesurer la pression de l’air.
Interroger
Pour savoir si l’on mesure une certaine pression de l'air, le bloc Capteur environnemental pression de l'air[] ... est utilisé. Le menu déroulant (petit triangle) permet de sélectionner comment comparer la pression de l’air à la valeur saisie (<, ≤, =, ≠, ≥, >). La valeur de comparaison est saisie dans le champ numérique à la fin du bloc. Ce bloc peut être utilisé comme une condition. Dans l’exemple, le moteur est arrêté lorsque la pression de l'air est supérieure à 10.

Thermomètre
Afficher
Avec le bloc Récupérer la température du capteur environnemental, on peut mesurer la pression de l’air.
Interroger
Pour savoir si l’on mesure une certaine température, le bloc Capteur environnemental température[] ... est utilisé. Le menu déroulant (petit triangle) permet de sélectionner comment comparer la température à la valeur saisie (<, ≤, =, ≠, ≥, >). La valeur de comparaison est saisie dans le champ numérique à la fin du bloc. Ce bloc peut être utilisé comme une condition. Dans l’exemple, le moteur est arrêté lorsque la température est supérieure à 10.

Capteur d’humidité de l’air
Afficher
Avec le bloc Récupérer l’humidité de l’air du capteur environnemental, on peut mesurer l’humidité de l’air.
Interroger
Pour savoir si l’on mesure une certaine température, le bloc Capteur environnemental humidité de l'air[] ... est utilisé. Le menu déroulant (petit triangle) permet de sélectionner comment comparer l’humidité de l’air à la valeur saisie (<, ≤, =, ≠, ≥, >). La valeur de comparaison est saisie dans le champ numérique à la fin du bloc. Ce bloc peut être utilisé comme une condition. Dans l’exemple, le moteur est arrêté lorsque l’humidité de l'air est supérieure à 10.

USB
Le port USB permet de connecter la caméra au microphone intégré. La caméra et le microphone sont ici observés séparément. Pour utiliser les fonctions de la caméra, il faut d'abord les configurer dans l’outil de configuration de la caméra. La méthode d'accès à l’outil de configuration de la caméra est expliquée ici.
Caméra

La caméra peut notamment servir de détecteur de mouvement, de détecteur de couleur, de détecteur de balle et de détecteur de ligne.
Détecteur de mouvement
Pour utiliser la caméra comme détecteur de mouvement, il faut faire glisser le symbole de bonhomme dans la surface encadrée dans le configurateur de la caméra, puis une fenêtre s’ouvre à droite, dans laquelle sous l’inspecteur
- on peut définir la zone de pixels dans laquelle les mouvements sont contrôlés
- la position de cette zone (au point indiqué se trouve le coin supérieur gauche de la zone),
- le nom du détecteur de mouvement et
- la tolérance
Programme du détecteur de mouvement
Le programme du détecteur de mouvement s'exécute lorsqu’un mouvement est détecté. Il est rédigé séparément du programme principal. Les variables fonctionnent globalement sur les deux programmes. Le programme de saisie s'exécute dans le bloc lorsqu’un mouvement est détecté.
Détecteur de couleur
Pour utiliser la caméra comme détecteur de couleur, il faut faire glisser le symbole de bonhomme dans la surface encadrée dans le configurateur de la caméra, puis une fenêtre s’ouvre à droite, dans laquelle sous l’inspecteur
- on peut définir la zone de pixels dans laquelle la couleur est contrôlée,
- la position en pixels de cette zone (au point indiqué se trouve le coin supérieur gauche de la zone),
- le nom du détecteur de couleur et
- le contraste
Afficher
Avec Récupérer la couleur comme [] , on obtient la couleur détectée en hexadécimal ou au format RGB. Le format peut être défini dans le menu déroulant (petit triangle).
Interroger
Pour déterminer si le détecteur a détecté une certaine couleur, le bloc Couleur détectée … est utilisé. Ce bloc peut être utilisé comme une condition.
Pour vérifier si le détecteur détecte une certaine couleur, ce bloc est
![]()
utilisé. Le bloc permet de comparer la couleur perçue avec une couleur saisie. Le menu déroulant (petit triangle) permet de choisir si la couleur sélectionnée doit être égale ou non à la couleur filmée. Ce bloc peut être utilisé comme une condition. Dans l’exemple, le moteur est arrêté lorsque la couleur détectée est rouge.

Programme du détecteur de couleur
Le programme de détection de couleur s'exécute lorsqu’une couleur est détectée. Il est rédigé séparément du programme principal. Les variables fonctionnent globalement sur les deux programmes. Le programme de saisie s'exécute dans le bloc lorsqu’une couleur est détectée.
Détecteur de balle
Pour utiliser la caméra comme détecteur de balle, il faut faire glisser le symbole de bonhomme dans la surface encadrée dans le configurateur de la caméra, puis une fenêtre s’ouvre à droite, dans laquelle sous l’inspecteur
- on peut définir la zone de pixels dans laquelle la balle est contrôlée,
- la position en pixels de cette zone (au point indiqué se trouve le coin supérieur gauche de la zone),
- le nom du détecteur de balle,
- la zone dans laquelle se situe le diamètre de la balle,
- la zone de l’axe x,
- la couleur de la balle et
- la tolérance de couleur
Afficher
Avec Récupérer la balle [] , on obtient la position x, la position y, le rayon ou le diamètre de la balle.
Interroger
Pour déterminer si le détecteur a détecté une balle, le bloc Balle détectée … est utilisé. Ce bloc peut être utilisé comme une condition.
Pour savoir si le détecteur détecte une balle avec une position x, une position y, un rayon ou un diamètre, ce bloc est
![]()
utilisé. Le bloc permet de comparer les spécifications de la balle détectée avec une valeur saisie. Les menus déroulants (petit triangle) permettent de sélectionner ce que vous souhaitez comparer et avec quel opérateur de comparaison. Ce bloc peut être utilisé comme une condition. Dans l’exemple, le moteur est arrêté lorsque le diamètre de la balle détectée est de 5.

Programme de détecteur de balle
Le programme de détecteur de balle s'exécute lorsqu’une couleur est détectée. Il est rédigé séparément du programme principal. Les variables fonctionnent globalement sur les deux programmes. Le programme de saisie s'exécute dans le bloc lorsqu’une balle est détectée.
Détecteur de lignes
Pour utiliser la caméra comme détecteur de lignes, il faut faire glisser le symbole avec les points sur une ligne dans la zone encadrée dans le configurateur de la caméra, puis une fenêtre s’ouvre à droite, dans laquelle sous l’inspecteur
- on peut définir la zone de pixels dans laquelle les lignes sont contrôlées,
- la position de cette zone (au point indiqué se trouve le coin supérieur gauche de la zone),
- le nom du détecteur de lignes,
- le nombre de lignes à détecter, et
- la zone dans laquelle la largeur des lignes se trouve
Afficher
Avec Récupérer [] la ligne [] on obtient la position ou la largeur d’une des cinq lignes au maximum.
Aec Récupérer la couleur de la ligne [] comme [] , on obtient la couleur d'une ligne en hexadécimal ou au format RGB. Le format peut être défini dans le menu déroulant (petit triangle).
Interroger
Pour déterminer si le détecteur a détecté une ligne, le bloc Ligne détectée … est utilisé. Ce bloc peut être utilisé comme une condition.
Pour savoir si le détecteur détecte une ligne avec une position ou une largeur définie, ce bloc est
![]()
utilisé. Le bloc permet de comparer les spécifications de la ligne détectée avec une valeur saisie. Les menus déroulants (petit triangle) permettent de sélectionner ce que vous souhaitez comparer et avec quel opérateur de comparaison. Ce bloc peut être utilisé comme une condition. Dans l’exemple, le moteur est arrêté lorsque la largeur de la ligne perçue est inférieure à 2.

Pour savoir si le détecteur détecte une ligne avec une couleur définie, ce bloc est
![]()
utilisé. Le bloc permet de comparer la couleur de la ligne perçue avec une couleur saisie. Le menu déroulant (petit triangle) permet de choisir si la couleur sélectionnée doit être égale ou non à la couleur filmée. Ce bloc peut être utilisé comme une condition.
Programme de détecteur de ligne
Le programme de détecteur de ligne s'exécute lorsqu’une ou plusieurs lignes sont détectées. Il est rédigé séparément du programme principal. Les variables fonctionnent globalement sur les deux programmes. Le programme de saisie s'exécute dans le bloc lorsqu’une ligne est détectée.
Microphone
Le microphone intégré à la caméra peut être utilisé comme détecteur de volume.
Le démarrage de chaque bloc
Le démarrage de chaque bloc permet d’exécuter un programme si une condition est remplie. Il fonctionne donc comme une distinction de cas, non seulement une fois, mais chaque fois que la condition est remplie, tout au long du programme. Le démarrage de chaque bloc :

Est une abréviation de la construction suivante :
On peut insérer dans le démarrage chaque bloc de la catégorie Microphone toutes les conditions de cette même catégorie.
Remarque : La section du programme à l’intérieur du démarrage de chaque bloc doit être courte et ne pas comporter d’appels bloqués ou de boucles de fin de session, afin que cette partie du programme puisse être traitée rapidement.
Détecteur de volume
Afficher
Avec Microphone Volume on obtient le volume en décibels.
Interroger
Pour vérifier si le détecteur de volume détecte un certain volume, ce bloc est
![]()
utilisé. Le bloc permet de comparer le volume perçu avec un volume saisi. Le menu déroulant (petit triangle) permet de sélectionner ce que vous souhaitez comparer et avec quel opérateur de comparaison. Ce bloc peut être utilisé comme une condition.