Sensoren
Invoeren
Het blok Start elke keer
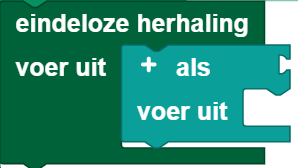
Het blok Start elke keer biedt de mogelijkheid om een programma te laten draaien, wanneer aan een voorwaarde is voldaan. Dit werkt dus net als een verschil tussen gevallen, maar wordt tijdens het gehele verloop van het programma niet slechts eenmaal doorlopen, maar elke keer wanneer aan de voorwaarde wordt voldaan. Het blok Start elke keer:

is een afkorting voor onderstaande constructie:
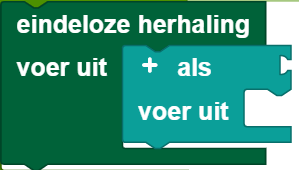
Je kunt in het blok Start elke keer van de categorie Invoeren alle voorwaarden uit juist deze categorie gebruiken.
Aanwijzing: Het programmagedeelte van het blok Start elke keer moet kort worden gehouden en mag geen blokkerende openingshandelingen of eindeloze loops bevatten, zodat dit deel van het programma snel kan worden afgewerkt.
Knop
De toets is een digitale sensor, die het onderscheid ziet tussen "Er vloeit stroom" en "Er vloeit geen stroom". Of er stroom vloeit is daarbij afhankelijk van de bedrading en of de toets is ingedrukt. Je kunt de toets dus op twee verschillende manier gebruiken:
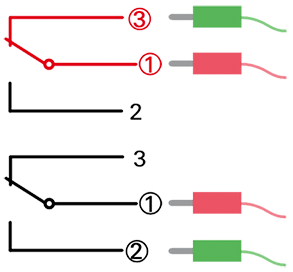
Als „Normally open-contact“:
de contacten 1 en 3 worden aangesloten.
Toets ingedrukt: er vloeit stroom. Toets niet ingedrukt: er vloeit geen stroom
de contacten 1 en 2 worden aangesloten.
Toets ingedrukt: er vloeit geen stroom. Toets niet ingedrukt: er vloeit stroom.
Openen
Met haal status minitoets op krijg je informatie of er wel of geen stroom door de toets stroomt. Wanneer er stroom vloeit wordt 1 aangegeven, vloeit er geen stroom, 0.
Opvragen
Om op te kunnen vragen of de toets in een bepaalde toestand verkeert, wordt gebruik gemaakt van blok is toets…. Via het dropdown-menu (klein driehoekje) kan worden aangegeven naar welke toestand wordt gevraagd. Dit blok kan als voorwaarde worden gebruikt.
Ultrasoonsensor

De ultrasoonsensor wordt gebruikt om afstanden te meten.
Openen
Met haal afstand ultrasoonsensor op krijg je de informatie hoever de sensor van het volgende voorwerp verwijderd is. De afstand wordt in cm aangegeven.
Opvragen
Om op te kunnen vragen of de sensor een bepaalde afstand tot het volgende voorwerp heeft, wordt gebruik gemaakt van het blok is afstand ultrasoonsensor …. Via het dropdown-menu (klein driehoekje) kan worden geselecteerd hoe de gemeten afstand met een ingevoerde waarde moet worden vergeleken (<, ≤, =, ≠, ≥, >). De vergelijkingswaarde wordt in het cijferveld aan het einde van het blok ingevoerd. Dit blok kan als voorwaarde worden gebruikt. In het voorbeeld wordt de motor gestopt wanneer de gemeten afstand korter is dan 2 cm.

Kleurensensor
De kleurensensor zendt rood licht uit en meet hoeveel daarvan wordt gereflecteerd. Afhankelijk van de sterkte van de reflectie geeft de kleurensensor waarden van 0 tot 2.000 weer. Hij is uitstekend geschikt om van tevoren gekalibreerde kleuren te herkennen.
Openen
Met haal waarde kleurensensor krijg je informatie over hoe sterk een oppervlak reflecteert.
Opvragen
Om op te kunnen vragen of de sensor een bepaalde kleur voor zich heeft, wordt gebruik gemaakt van het blok is waarde kleurensensor …. Via het dropdown-menu (klein driehoekje) kan worden geselecteerd hoe de gemeten kleurwaarde met de ingevoerde waarde moet worden vergeleken (<, ≤, =, ≠, ≥, >). De vergelijkingswaarde wordt in het cijferveld aan het einde van het blok ingevoerd. Dit blok kan als voorwaarde worden gebruikt. In het voorbeeld wordt de motor gestopt wanneer de gemeten kleurwaarde minder is dan 1.000.

IR-spoorsensor

De infrarood-spoorsensor is een digitale sensor voor het herkennen van een zwart spoor op een witte ondergrond, die bij een afstand van 5-30 mm van de sensor tot aan de ondergrond werkt.
Openen
Met haal status IR-spoorsensor krijg je 0, wanneer de sensor geen spoor herkent. Herkent de sensor een spoor dan wordt dit met een 1 aangegeven.
Opvragen
Om op te vragen of de IR-spoorsensor een spoor herkent, wordt de actuele spoorstatus met 0 of 1 vergeleken. Hiervoor kan het blok is status IR-spoorsensor [] … worden gebruikt. . Via het dropdown-menu (klein driehoekje) kan worden geselecteerd hoe de spoorstatus met de ingevoerde waarde moet worden vergeleken (<, ≤, =, ≠, ≥, >). De vergelijkingswaarde wordt in het cijferveld aan het einde van het blok ingevoerd. Dit blok kan als voorwaarde worden gebruikt. In het voorbeeld wordt de motor gestopt wanneer de spoorstatus 0 is.

Fototransistor

De fototransistor is een digitale sensor, die licht van donker onderscheidt.
Openen
Met haal status fototransistor krijg je 0, wanneer de sensor geen licht herkent. Wanneer de sensor voldoende licht herkent, wordt dat met een 1 aangegeven.
Opvragen
Om op te vragen of de fototransistor licht of donker herkent, wordt de helderheidsstatus met 0 of 1 vergeleken. Hiervoor kan het blok is status fototransistor [] … worden gebruikt. Via het dropdown-menu (klein driehoekje) kan worden aangegeven of naar licht of donker moet worden gevraagd.

Een mogelijk gebruik voor een fototransistor is een fotocel, zoals bij dit model.
Fotoweerstand

De weerstand van de fotoweerstand daalt wanneer deze aan meer licht wordt blootgesteld. De door de fotoweerstand uitgegeven waarde is dus een maat voor de helderheid.
Openen
Met haal waarde fotoweerstand krijg je de informatie over hoe helder het is. Hoe lager de aangegeven waarde des te lichter het is.
Opvragen
Om op te vragen of de fotoresistor een bepaalde helderheidswaarde mist, wordt het blok is waarde fotoweerstand [] ... gebruikt. Via het dropdown-menu (klein driehoekje) kan worden geselecteerd hoe de helderheidswaarde met de ingevoerde waarde moet worden vergeleken (<, ≤, =, ≠, ≥, >). De vergelijkingswaarde wordt in het cijferveld aan het einde van het blok ingevoerd. Dit blok kan als voorwaarde worden gebruikt. In het voorbeeld wordt de motor gestopt wanneer de helderheidswaarde minder is dan 3.000.

NTC-weerstand
De NTC-weerstand is een niet-binaire temperatuursensor. Zijn elektrische weerstand daalt wanneer de temperatuur stijgt en is daarmee een maat voor de temperatuur.
Openen
Met haal NTC-weerstand [] krijg je hetzij een weerstandswaarde of de daaruit berekende temperatuur. Hetgeen moet worden aangegeven kan via het dropdown-menu (klein driehoekje) worden geselecteerd.
Opvragen
Om op te vragen of de NTC-weerstand een bepaalde waarde meet, wordt het blok is NTC-weerstand [] [] … gebruikt. Via het dropdown-menu (klein driehoekje) kan worden geselecteerd wat en met welke vergelijkingsoperator moet worden vergeleken. De vergelijkingswaarde wordt in het cijferveld aan het einde van het blok ingevoerd. Dit blok kan als voorwaarde worden gebruikt. In het voorbeeld wordt de motor gestopt wanneer de temperatuur lager is dan 20.

Tellers

De encodermotor kan als teller worden gebruikt. Geteld worden het aantal omwentelingen, en niet alleen dan wanneer hij zelfstandig als motor draait, maar ook wanneer hij van buiten af mechanisch wordt aangedreven.
Het blok Start elke keer
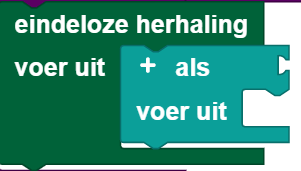
Het blok Start elke keer biedt de mogelijkheid om een programma te laten draaien, wanneer aan een voorwaarde is voldaan. Dit werkt dus net als een verschil tussen gevallen, maar wordt tijdens het gehele verloop van het programma niet slechts eenmaal doorlopen, maar elke keer wanneer aan de voorwaarde wordt voldaan. Het blok Start elke keer:

is een afkorting voor onderstaande constructie:
Je kunt in het blok Start elke keer van de categorie Tellers alle voorwaarden uit juist deze categorie gebruiken.
Aanwijzing: Het programmagedeelte van het blok Start elke keer moet kort worden gehouden en mag geen blokkerende openingshandelingen of eindeloze loops bevatten, zodat dit deel van het programma snel kan worden afgewerkt.
Openen
Met haal waarde teller krijg je de door de teller getelde waarde.
Opvragen
Om op te vragen of de teller een bepaalde waarde heeft geteld wordt dit blok
![]()
gebruikt. Via het dropdown-menu (klein driehoekje) kan worden geselecteerd hoe de getelde waarde met de ingevoerde waarde moet worden vergeleken (<, ≤, =, ≠, ≥, >).
Resetten
De teller begint opnieuw bij 0, wanneer het blok reset teller wordt uitgevoerd.
I2C
De in dit hoofdstuk beschreven I2C-sensoren worden met een geschikte bandkabel met de TXT 4.0 Controller verbonden.
Het blok Start elke keer
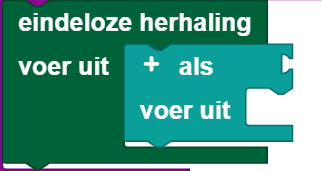
Het blok Start elke keer biedt de mogelijkheid om een programma te laten draaien, wanneer aan een voorwaarde is voldaan. Dit werkt dus net als een verschil tussen gevallen, maar wordt tijdens het gehele verloop van het programma niet slechts eenmaal doorlopen, maar elke keer wanneer aan de voorwaarde wordt voldaan. Het blok Start elke keer:

is een afkorting voor onderstaande constructie:
Je kunt in het blok Start elke keer van de categorie I2C alle voorwaarden uit juist deze categorie gebruiken.
Aanwijzing: Het programmagedeelte van het blok Start elke keer moet kort worden gehouden en mag geen blokkerende openingshandelingen of eindeloze loops bevatten, zodat dit deel van het programma snel kan worden afgewerkt.
Combisensor

De combisensor combineert de drie functies versnellingssensor, gyroscoop en kompassensor in een component.
Versnellingssensor
Openen
Met haal combisensor versnelling in [] krijg je de versnelling in één ruimtelijke richting. De gewenste ruimtelijke richting kun je via het dropdown-menu (klein driehoekje) kiezen. De versnelling wordt in g aangegeven.
Opvragen
Om op te kunnen vragen of je een bepaalde versnelling meet, wordt het blok is combisensor versnelling in [] [] ... gebruikt. Via het dropdown-menu (klein driehoekje) kun je selecteren hoe de versnelling met de ingevoerde waarde moet worden vergeleken (<, ≤, =, ≠, ≥, >) en welke ruimtelijke richting moet worden opgevraagd. De vergelijkingswaarde wordt in het cijferveld aan het einde van het blok ingevoerd. Dit blok kan als voorwaarde worden gebruikt. In het voorbeeld wordt de motor gestopt wanneer de versnelling in de x-richting groter is dan 10.

Gyroscoop
Openen
Met haal combisensor versnelling in [] krijg je de rotatie in één ruimtelijke richting. De gewenste ruimtelijke richting kun je via het dropdown-menu (klein driehoekje) kiezen. De rotatie wordt in °/s aangegeven.
Opvragen
Om op te kunnen vragen of je een bepaalde hoeksnelheid meet, wordt het blok is combisensor rotatie in [] [] ... gebruikt. Via het dropdown-menu (klein driehoekje) kun je selecteren hoe de rotatie met de ingevoerde waarde moet worden vergeleken (<, ≤, =, ≠, ≥, >) en welke ruimtelijke richting moet worden opgevraagd. De vergelijkingswaarde wordt in het cijferveld aan het einde van het blok ingevoerd. Dit blok kan als voorwaarde worden gebruikt. In het voorbeeld wordt de motor gestopt wanneer de rotatie in de x-richting groter is dan 10.

Kompassensor
Openen
Met haal combisensor magnetische flux in [] krijg je de magnetische flux in één ruimtelijke richting. De gewenste ruimtelijke richting kun je via het dropdown-menu (klein driehoekje) kiezen. De magnetische flux wordt in μT aangegeven.
Opvragen
Om op te kunnen vragen of je een bepaalde magnetische flux meet, wordt het blok is combisensor magnetische flux in [] [] ... gebruikt. Via het dropdown-menu (klein driehoekje) kun je selecteren hoe de magnetische flux met de ingevoerde waarde moet worden vergeleken (<, ≤, =, ≠, ≥, >) en welke ruimtelijke richting moet worden opgevraagd. De vergelijkingswaarde wordt in het cijferveld aan het einde van het blok ingevoerd. Dit blok kan als voorwaarde worden gebruikt. In het voorbeeld wordt de motor gestopt wanneer de magnetische flux in de x-richting groter is dan 10.

Omgevingssensor

De omgevingssensor combineert de vier functies luchtkwaliteitssensor, luchtvochtigheidssensor, barometer en thermometer in één component.
Luchtkwaliteitssensor
Openen
Met het blok haal omgevingssensor luchtkwaliteit als [] kun je de luchtkwaliteit meten. Via het dropdown-menu (klein driehoekje) kun je selecteren of de luchtkwaliteit in de vorm van een getal (van 0 tot 500) of als tekst moet worden aangegeven.
Opvragen
Om op te kunnen vragen of je een bepaalde luchtkwaliteit meet, wordt het blok is omgevingssensor luchtkwaliteit [] ... gebruikt. Via het dropdown-menu (klein driehoekje) kan worden geselecteerd hoe de luchtkwaliteit met de ingevoerde waarde moet worden vergeleken (<, ≤, =, ≠, ≥, >). De vergelijkingswaarde wordt in het cijferveld aan het einde van het blok ingevoerd. Dit blok kan als voorwaarde worden gebruikt. In het voorbeeld wordt de motor gestopt wanneer de luchtkwaliteit hoger is dan 10.

Barometer
Openen
Met het blok haal omgevingssensor luchtdruk kun je de luchtdruk meten.
Opvragen
Om op te kunnen vragen of je een bepaalde luchtdruk meet, wordt het blok is omgevingssensor luchtdruk [] ... gebruikt. Via het dropdown-menu (klein driehoekje) kan worden geselecteerd hoe de luchtdruk met de ingevoerde waarde moet worden vergeleken (<, ≤, =, ≠, ≥, >). De vergelijkingswaarde wordt in het cijferveld aan het einde van het blok ingevoerd. Dit blok kan als voorwaarde worden gebruikt. In het voorbeeld wordt de motor gestopt wanneer de luchtdruk hoger is dan 10.

Thermometer
Openen
Met het blok haal omgevingssensor temperatuur kun je de temperatuur meten.
Opvragen
Om op te kunnen vragen of je een bepaalde temperatuur meet, wordt het blok is omgevingssensor temperatuur [] ... gebruikt. Via het dropdown-menu (klein driehoekje) kan worden geselecteerd hoe de temperatuur met de ingevoerde waarde moet worden vergeleken (<, ≤, =, ≠, ≥, >). De vergelijkingswaarde wordt in het cijferveld aan het einde van het blok ingevoerd. Dit blok kan als voorwaarde worden gebruikt. In het voorbeeld wordt de motor gestopt wanneer de temperatuur hoger is dan 10.

Luchtvochtigheidssensor
Openen
Met het blok haal omgevingssensor luchtvochtigheid kun je de luchtvochtigheid meten.
Opvragen
Om op te kunnen vragen of je een bepaalde luchtvochtigheid meet, wordt het blok is omgevingssensor luchtvochtigheid [] ... gebruikt. Via het dropdown-menu (klein driehoekje) kan worden geselecteerd hoe de luchtvochtigheid met de ingevoerde waarde moet worden vergeleken (<, ≤, =, ≠, ≥, >). De vergelijkingswaarde wordt in het cijferveld aan het einde van het blok ingevoerd. Dit blok kan als voorwaarde worden gebruikt. In het voorbeeld wordt de motor gestopt wanneer de luchtvochtigheid hoger is dan 10.

USB
Met de USB-aansluiting kan de camera met geïntegreerde microfoon worden aangesloten. Camera en microfoon worden hier afzonderlijk behandeld. Om de functies van de camera te gebruiken moet je deze eerst in de cameraconfigurator configureren. Hoe je in de cameraconfigurator komt wordt hier uitgelegd.
Camera

De camera kan in het bijzonder als bewegingsdetector, als kleurendetector, als baldetector en als lijndetector worden gebruikt.
Bewegingsdetector
Om de camera als bewegingsdetector te gebruiken, moet je in de cameraconfigurator het mannetjessymbool naar het raster trekken waarna rechts een venster wordt geopend en je onder Inspecteur
- het pixelgebied, waarin op beweging wordt gecontroleerd,
- de positie van dit bereik (het bereik linksboven ligt op het aangegeven punt),
- de naam van de bewegingsdetector en
- de tolerantie
kunt vastleggen.
Bewegingsdetectorprogramma
Het bewegingsdetectorprogramma draait wanneer een beweging wordt herkend. Dit wordt afzonderlijk van het hoofdprogramma geschreven. Variabelen werken over het geheel genomen via beide programma's. Het invoerprogramma draait in het blok wanneer beweging herkend.
Kleurendetector
Om de camera als kleurendetector te gebruiken, moet je in de cameraconfigurator het pipettensymbool naar het raster trekken waarna rechts een venster wordt geopend en je onder Inspecteur
- het pixelgebied, waarin op kleur wordt gecontroleerd,
- de positie van dit bereik (het bereik linksboven ligt op het aangegeven punt),
- de naam van de kleurendetector en
- het contrast
kunt vastleggen.
Openen
Met haal kleur als [] krijg je de herkende kleur hexadecimaal of in RGB-formaat te zien. Het formaat kun je via het dropdown-menu (klein driehoekje) instellen.
Opvragen
Om op te kunnen vragen of de detector een kleur heeft waargenomen, wordt gebruik gemaakt van het blok is kleur gedetecteerd. Dit blok kan als voorwaarde worden gebruikt.
Om op te kunnen vragen of de detector een bepaalde kleur waarneemt wordt dit blok
![]()
gebruikt. Met het blok kun je de opgenomen kleur vergelijken met een reeds ingevoerde kleur. Via het dropdown-menu (klein driehoekje) kun je kiezen of de ingestelde kleur gelijk aan de gefilmde keur moet zijn of hiervan moet verschillen. Dit blok kan als voorwaarde worden gebruikt. In het voorbeeld wordt de motor gestopt wanneer de opgenomen kleur rood is.

Kleurendetectorprogramma
Het kleurendetectorprogramma draait wanneer een kleur wordt herkend. Dit wordt afzonderlijk van het hoofdprogramma geschreven. Variabelen werken over het geheel genomen via beide programma's. Het invoerprogramma draait in het blok wanneer kleur herkend.
Baldetector
Om de camera als baldetector te gebruiken, moet je in de cameraconfigurator het ballensymbool naar het raster trekken waarna rechts een venster wordt geopend en je onder Inspecteur
- het pixelgebied, waarin op ballen wordt gecontroleerd,
- de positie van dit bereik (het bereik linksboven ligt op het aangegeven punt),
- de naam van de baldetector,
- het gebied waarbinnen de diameter van de ballen ligt,
- het bereik van de x-as,
- de kleur van de bal en
- de kleurtolerantie
kunt vastleggen.
Openen
Met haal [] van de bal krijg je de x-positie, y-positie, radius of diameter van de bal.
Opvragen
Om op te kunnen vragen of de detector een bal heeft waargenomen, wordt gebruik gemaakt van het blok is bal gedetecteerd. Dit blok kan als voorwaarde worden gebruikt.
Om op te kunnen vragen of de detector een bal met een bepaalde x-positie, y-positie, radius of diameter waarneemt wordt dit blok
![]()
gebruikt. Met het blok kun je de specificaties van de opgenomen bal met een ingevoerde waarde vergelijken. Via het dropdown-menu (klein driehoekje) kan worden geselecteerd wat en met welke vergelijkingsoperator moet worden vergeleken. Dit blok kan als voorwaarde worden gebruikt. In het voorbeeld wordt de motor gestopt wanneer de diameter van de opgenomen bal 5 is.

Baldetectorprogramma
Het baldetectorprogramma draait wanneer een bal wordt herkend. Dit wordt afzonderlijk van het hoofdprogramma geschreven. Variabelen werken over het geheel genomen via beide programma's. Het invoerprogramma draait in het blok wanneer bal herkend.
Lijndetector
Om de camera als lijndetector te gebruiken, moet je in de cameraconfigurator het symbool met de punten op een lijn naar het raster trekken waarna rechts een venster wordt geopend en je onder Inspecteur
- het pixelgebied, waarin op lijnen wordt gecontroleerd,
- de positie van dit bereik (het bereik linksboven ligt op het aangegeven punt),
- de naam van de lijndetector,
- het aantal lijnen die herkend moeten worden en
- het gebied waarin de breedte van de lijn(en) ligt
kunt vastleggen.
Openen
Met haal [] van de lijn [] krijg je de positie of breedte van een van de maximaal vijf lijnen.
Met haal kleur van de lijn [] als [] kun je de kleur van een lijn als hexadecimaal of als RGB-formaat laten uitgeven. Het formaat kun je via het dropdown-menu (klein driehoekje) instellen.
Opvragen
Om op te kunnen vragen of de detector een lijn heeft waargenomen, wordt gebruik gemaakt van het blok is lijn gedetecteerd. Dit blok kan als voorwaarde worden gebruikt.
Om op te kunnen vragen of de detector een lijn met een bepaalde positie of breedte waarneemt wordt dit blok
![]()
gebruikt. Met het blok kun je de specificaties van de opgenomen lijn(en) met een ingevoerde waarde vergelijken. Via het dropdown-menu (klein driehoekje) kan worden geselecteerd wat en met welke vergelijkingsoperator moet worden vergeleken. Dit blok kan als voorwaarde worden gebruikt. In het voorbeeld wordt de motor gestopt wanneer de breedte van de opgenomen lijn minder is dan 2.

Om op te kunnen vragen of de detector een lijn met een bepaalde kleur waarneemt wordt dit blok
![]()
gebruikt. Met het blok kun je de opgenomen kleur van de lijn vergelijken met een reeds ingevoerde kleur. Via het dropdown-menu (klein driehoekje) kun je kiezen of de ingestelde kleur gelijk aan de gefilmde keur moet zijn of hiervan moet verschillen. Dit blok kan als voorwaarde worden gebruikt.
Lijndetectorprogramma
Het lijndetectorprogramma draait wanneer een of meerdere lijnen worden herkend. Dit wordt afzonderlijk van het hoofdprogramma geschreven. Variabelen werken over het geheel genomen via beide programma's. Het invoerprogramma draait in het blok wanneer lijn herkend.
Microfoon
De in de camera geïntegreerde microfoon kan als geluidsdetector worden gebruikt.
Het blok Start elke keer
Het blok Start elke keer biedt de mogelijkheid om een programma te laten draaien, wanneer aan een voorwaarde is voldaan. Dit werkt dus net als een verschil tussen gevallen, maar wordt tijdens het gehele verloop van het programma niet slechts eenmaal doorlopen, maar elke keer wanneer aan de voorwaarde wordt voldaan. Het blok Start elke keer:

is een afkorting voor onderstaande constructie:
Je kunt in het blok Start elke keer van de categorie Microfoon alle voorwaarden uit juist deze categorie gebruiken.
Aanwijzing: Het programmagedeelte van het blok Start elke keer moet kort worden gehouden en mag geen blokkerende openingshandelingen of eindeloze loops bevatten, zodat dit deel van het programma snel kan worden afgewerkt.
Geluidsdetector
Openen
Met microfoon volume krijg je het volume in decibel.
Opvragen
Om op te kunnen vragen of de geluidsdetector een bepaald volume waarneemt wordt dit blok
![]()
gebruikt. Met het blok kun je het opgenomen volume vergelijken met een reeds ingevoerd volume. Via het dropdown-menu (klein driehoekje) kan worden geselecteerd wat met welke vergelijkingsoperator moet worden vergeleken. Dit blok kan als voorwaarde worden gebruikt.