Sensores
Entradas
O início de cada bloco de tempo
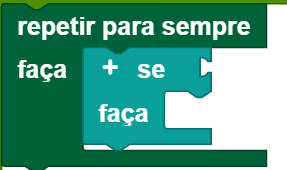
O bloco de tempo oferece a possibilidade de executar um programa se uma condição for satisfeita. Portanto, ele funciona de maneira semelhante a uma distinção de caso, mas não é executado apenas uma vez, e sim sempre que a condição for atendida durante todo o curso do programa. O início de cada bloco de tempo:

É uma abreviatura para a seguinte construção:
Você pode configurar todas as condições da categoria entradas em iniciar cada bloco de tempo a este nível.
Observação: A seção do programa dentro do iniciar de cada bloco de tempo deve ser mantida curta e não conter chamadas de bloqueio ou loops sem fim para que esta parte do programa possa ser processada rapidamente.
Teclado
O teclado é um sensor digital que distingue "corrente fluindo" de "nenhuma corrente fluindo". Se a corrente flui ou não depende do cabeamento e se a tecla está pressionada. Você pode usar o teclado de duas maneiras diferentes:
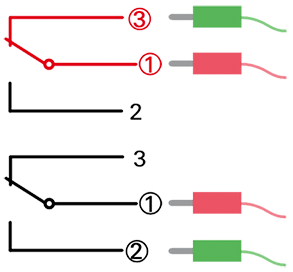
Como "contato":
os contatos 1 e 3 estão conectados.
Teclado pressionado: Assim, flui uma corrente. Teclado não pressionado: Assim, não flui uma corrente.
Os contatos 1 e 2 estão conectados.
Teclado pressionado: Assim, não flui uma corrente. Teclado não pressionado: Assim, flui uma corrente.
Lembrar
Com obter o status do mini-teclado, você obtém informações sobre se a corrente está fluindo através do teclado ou não. Se a corrente flui, 1 retornado, se nenhuma corrente flui, 0.
Consultar
Para consultar se o botão está em um determinado estado, o bloco o teclado está... é usado. O menu suspenso (triângulo pequeno) pode ser usado para selecionar qual status é solicitado. Este bloco pode ser usado como condição.
Sensor ultrassônico

O sensor ultrassônico é usado para medir distâncias.
Lembrar
Com obter distância do sensor ultrassônico, você obtém as informações sobre a distância do sensor em relação ao próximo objeto. A distância é retornada em cm.
Consultar
Para consultar se o sensor está a uma certa distância do próximo objeto, o bloco a distância do sensor ultrassônico está a ... é usado. O menu suspenso (triângulo pequeno) pode ser usado para selecionar como a distância medida deve ser comparada com um valor inserido (<, ≤, =, ≠, ≥,>) O valor de comparação é inserido no campo numérico ao final do bloco. Este bloco pode ser usado como condição. No exemplo, o motor é parado quando a distância medida for inferior a 2 cm.

Sensor de cores
O sensor de cores envia luz vermelha e mede o quanto dela é refletida. Dependendo da intensidade do reflexo, o sensor de cores retorna valores de 0 a 2.000. É adequado para reconhecer cores previamente calibradas.
Lembrar
Com obter valor do sensor de cores, recebe-se a informação da intensidade com que uma superfície reflete a luz.
Consultar
Para saber se o sensor tem uma determinada cor à sua frente, o bloco o valor do sensor de cores está a ... é usado. O menu suspenso (triângulo pequeno) pode ser usado para selecionar como o valor de cor mensurado deve ser comparado com o valor inserido (<, ≤, =, ≠, ≥,>) O valor de comparação é inserido no campo numérico ao final do bloco. Este bloco pode ser usado como condição. No exemplo, o motor é parado quando o valor da cor medida for inferior a 1000.

Sensor de rastreamento infravermelho

O sensor de rastreamento infravermelho é um sensor digital para a detecção de um rastro preto em um fundo branco, funcionando a uma distância de 5 a 30 mm do sensor ao substrato.
Lembrar
Com obter status do sensor de rastreamento infravermelho, você obterá 0 se o sensor não detectar um rastro. Caso o sensor detecte um rastro, 1 é retornado
Consultar
Para consultar se o sensor IR da faixa detecta um rastro, compare o status do rastro atual com 0 ou 1. Para tanto, o bloco adequado é o status do sensor de rastreamento infravermelho está [] ... . O menu suspenso (triângulo pequeno) pode ser usado para selecionar como o status do rastro deve ser comparado com o valor inserido (<, ≤, =, ≠, ≥,>) O valor de comparação é inserido no campo numérico ao final do bloco. Este bloco pode ser usado como condição. No exemplo, o motor é parado quando o status do rastro medido for 0.

Fototransistor

O fototransistor é um sensor digital que distingue a luz da escuridão.
Lembrar
Com obter status do fototransistor, você obterá 0 se o sensor não detectar luz. Caso o sensor detecte luz, 1 é retornado.
Consultar
Para consultar se o fototransistor detecta luz ou escuridão, compare o status de luminosidade com 0 ou 1. Para tanto, o bloco adequado é o status do status do fototransistor está [] . O menu suspenso (triângulo pequeno) pode ser usado para selecionar se deve ser consultado se está claro ou escuro.

Um possível uso para um fototransistor é em uma barreira de luz, como neste modelo.
Fotorresistor

A resistência do fotorresistor diminuirá à medida que ele for exposto a mais luminosidade. O valor resultante do fotorresistor é, portanto, uma medida de luminosidade.
Lembrar
Com obter valor do fotorresistor, você obtém a informação do nível de luminosidade. Quanto menor o valor exibido, mais luminoso estará.
Consultar
Para saber se o fotorresistor mede um determinado valor de luminosidade, o bloco o valor do fotorresistor está [] ... é usado. No menu suspenso (triângulo pequeno), você pode selecionar como o valor de luminosidade deve ser comparado com o valor inserido (<, ≤, =, ≠, ≥,>). O valor de comparação é inserido no campo numérico ao final do bloco. Este bloco pode ser usado como condição. No exemplo, o motor é parado quando o valor da luminosidade é inferior a 3000.

Resistor NTC
O resistor NTC é um sensor de temperatura não binário. Sua resistência elétrica diminui quando a temperatura sobe e, portanto, é uma medida da temperatura.
Lembrar
Com obter resistor NTC [], você obtém um valor de resistência ou a temperatura calculada a partir dele. O que deve ser retornado pode ser selecionado no menu suspenso (triângulo pequeno).
Consultar
Para consultar se o resistor NTC mede um determinado valor, o bloco o resistor NTC está [] [] ... Os menus suspensos (triângulo pequeno) podem ser usados para selecionar o que deve ser comparado e com qual operador de comparação. O valor de comparação é inserido no campo numérico ao final do bloco. Este bloco pode ser usado como condição. No exemplo, o motor é parado quando o valor da temperatura é inferior a 20.

Contador

O motor codificador pode ser usado como contador. O número de suas revoluções é contado não apenas quando ele gira como um motor, mas também quando é mecanicamente acionado de fora.
O início de cada bloco de tempo
O bloco de tempo oferece a possibilidade de executar um programa se uma condição for satisfeita. Portanto, ele funciona de maneira semelhante a uma distinção de caso, mas não é executado apenas uma vez, e sim sempre que a condição for atendida durante todo o curso do programa. O início de cada bloco de tempo:

É uma abreviatura para a seguinte construção:
Você pode configurar todas as condições da categoria contador em iniciar cada bloco de tempo a este nível.
Observação: A seção do programa dentro do iniciar de cada bloco de tempo deve ser mantida curta e não conter chamadas de bloqueio ou loops sem fim para que esta parte do programa possa ser processada rapidamente.
Lembrar
Com obter valor do contador, você obtém o valor contado pelo contador.
Consultar
Este bloco é usado para consultar se o contador contou determinado valor
![]()
O menu suspenso (triângulo pequeno) pode ser usado para selecionar como o valor contado deve ser comparado com o valor inserido (<, ≤, =, ≠, ≥,>).
Restaurar ao padrão
O contador começa novamente em 0 quando o bloco restaurar o contador é executado.
I2C
Os sensores I2C descritos neste capítulo são conectados ao controlador TXT 4.0 usando-se um cabo de fita adequado.
O início de cada bloco de tempo
O bloco de tempo oferece a possibilidade de executar um programa se uma condição for satisfeita. Portanto, ele funciona de maneira semelhante a uma distinção de caso, mas não é executado apenas uma vez, e sim sempre que a condição for atendida durante todo o curso do programa. O início de cada bloco de tempo:

É uma abreviatura para a seguinte construção:
Você pode configurar todas as condições da categoria l2C em iniciar cada bloco de tempo a este nível.
Observação: A seção do programa dentro do iniciar de cada bloco de tempo deve ser mantida curta e não conter chamadas de bloqueio ou loops sem fim para que esta parte do programa possa ser processada rapidamente.
Sensor de combinação

O sensor de combinação combina as três funções de acelerômetro, giroscópio e sensor de bússola em um componente.
Acelerômetro
Lembrar
Com obter a aceleração do sensor de combinação [], obtém-se a aceleração em uma direção espacial. A direção espacial desejada pode ser selecionada por meio do menu suspenso (triângulo pequeno): A aceleração é dada em g.
Consultar
Para consultar se uma determinada aceleração está sendo medida, o bloco a aceleração do sensor de combinação está [] [] ... é usado. O menu suspenso (triângulo pequeno) pode ser usado para selecionar como a aceleração deve ser comparada com o valor inserido (<, ≤, =, ≠, ≥,>) e qual direção espacial deve ser consultada. O valor de comparação é inserido no campo numérico ao final do bloco. Este bloco pode ser usado como condição. No exemplo, o motor é parado quando a aceleração na direção x é maior que 10.

Giroscópio
Lembrar
Com obter a rotação do sensor de combinação em [], obtém-se a aceleração em uma direção espacial. A direção espacial desejada pode ser selecionada por meio do menu suspenso (triângulo pequeno): A rotação é dada em °/s.
Consultar
Para consultar se uma determinada aceleração está sendo medida, o bloco a rotação do sensor de combinação está [] [] ... é usado. O menu suspenso (triângulo pequeno) pode ser usado para selecionar como a rotação deve ser comparada com o valor inserido (<, ≤, =, ≠, ≥,>) e qual direção espacial deve ser consultada. O valor de comparação é inserido no campo numérico ao final do bloco. Este bloco pode ser usado como condição. No exemplo, o motor é parado quando a rotação na direção x é maior que 10.

Sensor de bússola
Lembrar
Com obter fluxo magnético do sensor de combinação [], , o fluxo magnético é obtido em uma direção espacial. A direção espacial desejada pode ser selecionada por meio do menu suspenso (triângulo pequeno): O fluxo magnético é dado em μT.
Consultar
Para consultar se um determinado fluxo magnético está sendo medido, o bloco o fluxo magnético do sensor de combinação está em [] [] ... é usado. O menu suspenso (triângulo pequeno) pode ser usado para selecionar como o fluxo magnético deve ser comparado com o valor inserido (<, ≤, =, ≠, ≥,>) e qual direção espacial deve ser consultada. O valor de comparação é inserido no campo numérico ao final do bloco. Este bloco pode ser usado como condição. No exemplo, o motor é parado quando o fluxo magnético na direção x é maior que 10.

Sensor ambiental

O sensor ambiental combina as quatro funções de sensor de qualidade do ar, sensor de umidade, barômetro e termômetro em um único componente.
Sensor de qualidade do ar
Lembrar
Com o bloco, obter a qualidade do ar do sensor ambiental como [], é possível medir a qualidade do ar. O menu suspenso (triângulo pequeno) pode ser usado para escolher se a qualidade do ar deve ser retornada como um valor numérico (de 0 a 500) ou como texto.
Consultar
Para consultar se uma determinada qualidade do ar está sendo medida, o bloco a qualidade do ar do sensor ambiental está [] ... é usado. O menu suspenso (triângulo pequeno) pode ser usado para selecionar como a qualidade do ar deve ser comparada com o valor inserido (<, ≤, =, ≠, ≥,>). O valor de comparação é inserido no campo numérico ao final do bloco. Este bloco pode ser usado como condição. No exemplo, o motor é parado quando o valor da qualidade do ar é inferior a 10.

Barômetro
Lembrar
Com o bloco obter pressão atmosférica do sensor ambiental, você pode medir a pressão atmosférica.
Consultar
Para consultar se uma determinada pressão atmosférica está sendo medida, o bloco a pressão atmosférica do sensor ambiental está [] ... é usado. O menu suspenso (triângulo pequeno) pode ser usado para selecionar como a pressão atmosférica deve ser comparada com o valor inserido (<, ≤, =, ≠, ≥,>). O valor de comparação é inserido no campo numérico ao final do bloco. Este bloco pode ser usado como condição. No exemplo, o motor é parado quando o valor da pressão atmosférica é inferior a 10.

Termômetro
Lembrar
Com o bloco obter a temperatura do sensor ambiental , é possível medir a temperatura.
Consultar
Para consultar se uma determinada temperatura está sendo medida, o bloco a temperatura do sensor ambiental está [] ... é usado. O menu suspenso (triângulo pequeno) pode ser usado para selecionar como a temperatura deve ser comparada com o valor inserido (<, ≤, =, ≠, ≥,>). O valor de comparação é inserido no campo numérico ao final do bloco. Este bloco pode ser usado como condição. No exemplo, o motor é parado quando a temperatura é superior a 10.

Sensor de umidade
Lembrar
Com o bloco obter a umidade do sensor ambiental , é possível medir a umidade do ar.
Consultar
Para consultar se uma determinada umidade está sendo medida, o bloco a umidade do sensor ambiental está [] ... é usado. O menu suspenso (triângulo pequeno) pode ser usado para selecionar como a umidade deve ser comparada com o valor inserido (<, ≤, =, ≠, ≥,>). O valor de comparação é inserido no campo numérico ao final do bloco. Este bloco pode ser usado como condição. No exemplo, o motor é parado quando a umidade é superior a 10.

USB
A câmera com um microfone integrado pode ser conectada através da porta USB. A câmera e o microfone são vistos separadamente aqui. Para usar as funções da câmera, primeiro você deve configurá-las no configurador da câmera. Como chegar ao configurador da câmera é explicado aqui.
Câmera

A câmera pode ser usada em particular como um detector de movimento, como um detector de cores, como um detector de círculos e como um detector de linhas.
Detector de movimento
Para usar a câmera como um detector de movimento, você deve arrastar o símbolo masculino no configurador da câmera para a área da grade, e então uma janela será aberta à direita, na qual será possível definir, em Inspetor,
- a área de pixels na qual verificar o movimento,
- a posição dessa área (o canto superior esquerdo da caixa de seleção está no canto superior esquerdo da área),
- o nome do detector de movimento e
- a tolerância
.
Programa do detector de movimento
O programa do detector de movimento é executado quando movimento é detectado. Ele é escrito separadamente do programa principal. As variáveis funcionam globalmente em ambos os programas. O programa do detector de movimento é executado no bloco quando movimento é detectado.
Detector de cores
Para usar a câmera como um detector de cores, você deve arrastar o símbolo da pipeta para a área da grade, e então uma janela será aberta à direita, na qual será possível definir, em Inspetor,
- a área de pixels na qual verificar cores,
- a posição dessa área (o canto superior esquerdo da caixa de seleção está no canto superior esquerdo da área),
- o nome do detector de cores e
- o contraste
.
Lembrar
Com obter cores como [] ,você obtém a cor reconhecida em hexadecimais ou no formato RGB. O formato pode ser definido usando-se o menu suspenso (triângulo pequeno).
Consultar
Para consultar se o detector captou uma cor, o bloco a cor foi detectada é usado. Este bloco pode ser usado como condição.
Este bloco é usado para consultar se o detector capta uma determinada cor
![]()
O bloco pode ser usado para comparar a cor captada com uma inserida. O menu suspenso (triângulo pequeno) pode ser usado para escolher se a cor definida deve ser igual ou não à cor captada. Este bloco pode ser usado como condição. No exemplo, o motor é parado quando a cor captada é vermelha.

Programa do detector de cores
O programa do detector de cores é executado quando uma cor é detectada. Ele é escrito separadamente do programa principal. As variáveis funcionam globalmente em ambos os programas. O programa de entrada é executado no bloco quando cor é reconhecida.
Detector de círculos
Para usar a câmera como um detector de círculos, você deve arrastar o símbolo do círculo no configurador da câmera para a área da grade, então uma janela será aberta à direita, na qual você poderá selecionar, em Inspetor,
- a área de pixels na qual verificar círculos,
- a posição dessa área (o canto superior esquerdo da caixa de seleção está no canto superior esquerdo da área),
- o nome do detector de círculos,
- a área em que se encontra o diâmetro do círculo,
- a área do eixo x,
- a cor do círculo e
- a tolerância de cor
.
Lembrar
Com obter [] do círculo, é possível obter a posição x, posição y, o raio ou o diâmetro do círculo.
Consultar
Para consultar se o detector captou um círculo, o bloco o círculo foi detectado é usado. Este bloco pode ser usado como condição.
Este bloco é usado para consultar se o detector detecta um círculo com uma determinada posição x, posição y, raio ou diâmetro
![]()
O bloco pode ser usado para comparar as especificações do círculo captado com um valor inserido. Os menus suspensos (triângulo pequeno) podem ser usados para selecionar o que deve ser comparado e com qual operador de comparação. Este bloco pode ser usado como condição. No exemplo, o motor é parado quando o diâmetro do círculo captado for inferior a 5.

Programa do detector de círculos
O programa do detector de círculos é executado quando um círculo é detectado. Ele é escrito separadamente do programa principal. As variáveis funcionam globalmente em ambos os programas. O programa de entrada é executado no bloco quando o círculo é reconhecido .
Detector de linhas
Para usar a câmera como um detector de linhas, você deve arrastar o símbolo daos pontos para a área da grade, e então uma janela será aberta à direita, na qual será possível definir, em Inspetor,
- a área de pixels na qual verificar linhas,
- a posição dessa área (o canto superior esquerdo da caixa de seleção está no canto superior esquerdo da área),
- o nome do detector de linhas,
- o número de linhas a serem reconhecidas e
- a área em que se encontra a largura da(s) linha(s)
.
Lembrar
Com obter [] da linha [], é possível obter a posição ou largura de uma dentre, no máximo, cinco linhas.
Com obter cor da linha [] como [], é possível obter a cor de uma linha em hexadecimais ou no formato RGB. O formato pode ser definido usando-se o menu suspenso (triângulo pequeno).
Consultar
Para consultar se o detector captou uma linha, o bloco a linha foi detectada é usado. Este bloco pode ser usado como condição.
Este bloco é usado para consultar se o detector detecta uma linha com determinada posição ou largura
![]()
O bloco pode ser usado para comparar as especificações da linha captada com um valor inserido. Os menus suspensos (triângulo pequeno) podem ser usados para selecionar o que deve ser comparado e com qual operador de comparação. Este bloco pode ser usado como condição. No exemplo, o motor é parado quando o valor da linha captada for inferior a 2.

Este bloco é usado para consultar se o detector detecta uma linha com uma determinada cor
![]()
O bloco pode ser usado para comparar a cor da linha captada com uma inserida. O menu suspenso (triângulo pequeno) pode ser usado para escolher se a cor definida deve ser igual ou não à cor captada. Este bloco pode ser usado como condição.
Programa do detector de linhas
O programa do detector de linhas é executado quando uma ou mais linhas são detectadas. Ele é escrito separadamente do programa principal. As variáveis funcionam globalmente em ambos os programas. O programa de entrada é executado no bloco quando linhas são detectadas.
Microfone
O microfone integrado à câmera pode ser usado como detector de volume.
O início de cada bloco de tempo
O bloco de tempo oferece a possibilidade de executar um programa se uma condição for satisfeita. Portanto, ele funciona de maneira semelhante a uma distinção de caso, mas não é executado apenas uma vez, e sim sempre que a condição for atendida durante todo o curso do programa. O início de cada bloco de tempo:

É uma abreviatura para a seguinte construção:
Você pode configurar todas as condições da categoria microfone em iniciar cada bloco de tempo a este nível.
Observação: A seção do programa dentro do iniciar de cada bloco de tempo deve ser mantida curta e não conter chamadas de bloqueio ou loops sem fim para que esta parte do programa possa ser processada rapidamente.
Detector de volume
Lembrar
Com volume do microfone, você obtém o volume em decibéis.
Consultar
Este bloco é usado para consultar se o detector de volume capta um determinado volume
![]()
O bloco pode ser usado para comparar o volume captado com um inserido. O menu suspenso (triângulo pequeno) pode ser usado para selecionar com qual operador de comparação deve-se comparar. Este bloco pode ser usado como condição.