
I2C
Die in diesem Kapitel beschriebenen I2C-Sensoren werden über ein geeignetes Flachbandkabel mit dem TXT 4.0 Controller verbunden.
Der Starte jedes mal-Block
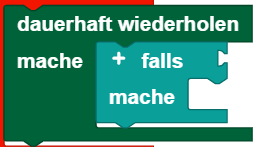
Der Starte jedes mal-Block bietet die Möglichkeit ein Programm ablaufen zulassen, wenn eine Bedingung erfüllt ist. Er funktioniert also ähnlich wie eine Fallunterscheidung wird aber nicht nur einmal durchlaufen, sondern jedes mal, wenn die Bedingung erfüllt ist, während des gesamten Ablauf des Programms. Der Starte jedes mal-Block:

Ist eine Abkürzung für folgendes Konstrukt:
Man kann in den Starte jedes mal-Block der Kategorie I2C alle Bedingungen aus eben dieser Kategorie einsetzten.
Kombisensor

Der Kombisensor vereint die drei Funktion Beschleunigungssensor, Gyroskop und Kompasssensor in einem Bauteil.
Beschleunigungssensor
Abrufen
Mit hole Kombisensor Beschleunigung in [] erhält man die Beschleunigung in einer Raumrichtungen. Die gewünschte Raumrichtung kann über das Dropdown-Menü (kleines Dreieck) gewählt werden. Die Beschleunigung wird in g angegeben.
Abfragen
Um abzufragen, ob man eine bestimmte Beschleunigung misst, wird der Block ist Kombisensor Beschleunigung in [] [] ... genutzt. Über die Dropdown-Menüs (kleines Dreieck) kann ausgewählt wie die Beschleunigung mit dem eingegebenen Wert verglichen werden soll (<, ≤, =, ≠, ≥, >) und welche Raumrichtung abgefragt werden soll. Der Vergleichswert wird in das Zahlenfeld am Ende des Blocks eingegeben. Dieser Block kann als Bedingung genutzt werden. Im Beispiel wird der Motor gestoppt, wenn die Beschleunigung in x-Richtung größer als 10 ist.

Gyroskop
Abrufen
Mit hole Kombisensor Rotation in [] erhält man die Rotation in einer Raumrichtungen. Die gewünschte Raumrichtung kann über das Dropdown-Menü (kleines Dreieck) gewählt werden. Die Rotation wird in °/s angegeben.
Abfragen
Um abzufragen, ob man eine bestimmte Winkelgeschwindigkeit misst, wird der Block ist Kombisensor Rotation in [] [] ... genutzt. Über die Dropdown-Menüs (kleines Dreieck) kann ausgewählt wie die Rotation mit dem eingegebenen Wert verglichen werden soll (<, ≤, =, ≠, ≥, >) und welche Raumrichtung abgefragt werden soll. Der Vergleichswert wird in das Zahlenfeld am Ende des Blocks eingegeben. Dieser Block kann als Bedingung genutzt werden. Im Beispiel wird der Motor gestoppt, wenn die Rotation in x-Richtung größer als 10 ist.

Kompasssensor
Abrufen
Mit hole Kombisensor Magnetfluss in [] erhält man den magnetischen Fluss in einer Raumrichtungen. Die gewünschte Raumrichtung kann über das Dropdown-Menü (kleines Dreieck) gewählt werden. Der magnetische Fluss wird in μT angegeben.
Abfragen
Um abzufragen, ob man einen bestimmten magnetischen Fluss misst, wird der Block ist Kombisensor Magnetfluss in [] [] ... genutzt. Über die Dropdown-Menüs (kleines Dreieck) kann ausgewählt wie der magnetische Fluss mit dem eingegebenen Wert verglichen werden soll (<, ≤, =, ≠, ≥, >) und welche Raumrichtung abgefragt werden soll. Der Vergleichswert wird in das Zahlenfeld am Ende des Blocks eingegeben. Dieser Block kann als Bedingung genutzt werden. Im Beispiel wird der Motor gestoppt, wenn der magnetische Fluss in x-Richtung größer als 10 ist.

Umweltsensor

Der Umweltsensor vereint die vier Funktionen Luftqualitätssensor, Luftfeuchtigkeitssensor, Barometer und Thermometer in einem Bauteil.
Luftqualitätssensor
Abrufen
Mit dem Block hole Umweltsensor Luftqualität als [] kann man die Luftqualität messen. Über das Dropdown-Menü (kleines Dreieck) kann gewählt werden, ob die Luftqualität als Zahlenwert (von 0 bis 500) oder als Text zurückgegeben werden soll.
Abfragen
Um abzufragen, ob man eine bestimmte Luftqualität misst, wird der Block ist Umweltsensor Luftqualität [] ... genutzt. Über das Dropdown-Menü (kleines Dreieck) kann ausgewählt wie die Luftqualität mit dem eingegebenen Wert verglichen werden soll (<, ≤, =, ≠, ≥, >). Der Vergleichswert wird in das Zahlenfeld am Ende des Blocks eingegeben. Dieser Block kann als Bedingung genutzt werden. Im Beispiel wird der Motor gestoppt, wenn die Luftqualität größer als 10 ist.

Barometer
Abrufen
Mit dem Block hole Umweltsensor Luftdruck kann man den Luftdruck messen.
Abfragen
Um abzufragen, ob man einen bestimmten Luftdruck misst, wird der Block ist Umweltsensor Luftdruck [] ... genutzt. Über das Dropdown-Menü (kleines Dreieck) kann ausgewählt wie der Luftdruck mit dem eingegebenen Wert verglichen werden soll (<, ≤, =, ≠, ≥, >). Der Vergleichswert wird in das Zahlenfeld am Ende des Blocks eingegeben. Dieser Block kann als Bedingung genutzt werden. Im Beispiel wird der Motor gestoppt, wenn der Luftdruck größer als 10 ist.

Thermometer
Abrufen
Mit dem Block hole Umweltsensor Temperatur kann man die Temperatur messen.
Abfragen
Um abzufragen, ob man eine bestimmte Temperatur misst, wird der Block ist Umweltsensor Temperatur [] ... genutzt. Über das Dropdown-Menü (kleines Dreieck) kann ausgewählt wie die Temperatur mit dem eingegebenen Wert verglichen werden soll (<, ≤, =, ≠, ≥, >). Der Vergleichswert wird in das Zahlenfeld am Ende des Blocks eingegeben. Dieser Block kann als Bedingung genutzt werden. Im Beispiel wird der Motor gestoppt, wenn die Temperatur größer als 10 ist.

Luftfeuchtigkeitssensor
Abrufen
Mit dem Block hole Umweltsensor Luftfeuchtigkeit kann man die Luftfeuchtigkeit messen.
Abfragen
Um abzufragen, ob man eine bestimmte Luftfeuchtigkeit misst, wird der Block ist Umweltsensor Luftfeuchtigkeit [] ... genutzt. Über das Dropdown-Menü (kleines Dreieck) kann ausgewählt wie die Luftfeuchtigkeit mit dem eingegebenen Wert verglichen werden soll (<, ≤, =, ≠, ≥, >). Der Vergleichswert wird in das Zahlenfeld am Ende des Blocks eingegeben. Dieser Block kann als Bedingung genutzt werden. Im Beispiel wird der Motor gestoppt, wenn die Luftfeuchtigkeit größer als 10 ist.
