
I2C
Los sensores I2C descritos en este capítulo se conectan al TXT 4.0 Controller mediante un cable plano adecuado.
Arranque de cada bloque
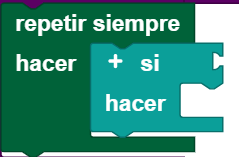
El arranque de cada bloque ofrece la posibilidad de ejecutar un programa si se cumple una condición. Funciona de manera similar a la distinción de casos, pero no se ejecuta solo una vez, sino cada vez que se cumple la condición durante todo el transcurso del programa. Arranque de cada bloque:

Es una abreviatura del siguiente constructo:
Se pueden utilizar todas las condiciones de esta categoría en el Arranque de cada bloque de la categoría I2C.
Sensor combinado

El sensor de combinación reúne las tres funciones de sensor de aceleración, giroscopio y sensor de brújula en un solo componente.
Sensor de aceleración
Acceso
En obtención de aceleración del sensor combinado en [] se muestra la aceleración en una dirección espacial. La dirección espacial deseada se puede seleccionar utilizando el menú desplegable (triángulo pequeño). La aceleración se especifica en g.
Consulta
Para consultar si se está midiendo una aceleración determinada se utiliza el bloque es la aceleración del sensor combinado en [] [] .... El menú desplegable (triángulo pequeño) se puede utilizar para determinar cómo se debe comparar la aceleración con el valor introducido (<, ≤, =, ≠, ≥, >) y qué dirección espacial se debe consultar. El valor comparativo se inserta en el campo numérico al final del bloque. Este bloque se puede utilizar como condición. En el ejemplo, el motor se detiene cuando la aceleración en la dirección x es superior a 10.

Giroscopio
Acceso
En obtención de giro del sensor combinado en [] se muestra el giro en una dirección espacial. La dirección espacial deseada se puede seleccionar utilizando el menú desplegable (triángulo pequeño). La rotación se expresa en °/s.
Consulta
Para consultar si se está midiendo una velocidad angular determinada se utiliza el bloque es el giro del sensor combinado en [] [] .... El menú desplegable (triángulo pequeño) se puede utilizar para determinar cómo se debe comparar el giro con el valor introducido (<, ≤, =, ≠, ≥, >) y qué dirección espacial se debe consultar. El valor comparativo se inserta en el campo numérico al final del bloque. Este bloque se puede utilizar como condición. En el ejemplo, el motor se detiene cuando el giro en la dirección x es superior a 10.

Sensor de brújula
Acceso
En obtención del flujo magnético del sensor combinado en [] se muestra el flujo magnético en una dirección espacial. La dirección espacial deseada se puede seleccionar utilizando el menú desplegable (triángulo pequeño). El flujo magnético se expresa en μT.
Consulta
Para consultar si se está midiendo un flujo magnético determinado se utiliza el bloque es el flujo magnético del sensor combinado en [] [] .... El menú desplegable (triángulo pequeño) se puede utilizar para determinar cómo se debe comparar el flujo magnético con el valor introducido (<, ≤, =, ≠, ≥, >) y qué dirección espacial se debe consultar. El valor comparativo se inserta en el campo numérico al final del bloque. Este bloque se puede utilizar como condición. En el ejemplo, el motor se detiene cuando el flujo magnético en la dirección x es superior a 10.

Sensor ambiental

El sensor medioambiental reúne en un componente cuatro funciones: sensor de calidad del aire, sensor de humedad del aire, barómetro y termómetro.
Sensor de calidad del aire
Acceso
Con el bloque obtención de la calidad del aire con el sensor medioambiental [] se puede medir la calidad del aire. En el menú desplegable (triángulo pequeño) se puede seleccionar cómo mostrar la calidad del aire: como valor (de 0 a 500) o como texto.
Consulta
Para consultar si se está midiendo una calidad del aire determinada se utiliza el bloque es la calidad del aire del sensor medioambiental [] ... El menú desplegable (triángulo pequeño) se puede utilizar para determinar cómo se debe comparar la calidad del aire con un valor introducido (<, ≤, =, ≠, ≥, >). El valor comparativo se inserta en el campo numérico al final del bloque. Este bloque se puede utilizar como condición. En el ejemplo, el motor se detiene cuando la calidad del aire es superior a 10.

Barómetro
Acceso
Con el bloque obtención de la presión del aire con el sensor medioambiental se puede medir la presión del aire.
Consulta
Para consultar si se está midiendo una presión del aire determinada se utiliza el bloque es la presión del aire del sensor medioambiental [] ... El menú desplegable (triángulo pequeño) se puede utilizar para determinar cómo se debe comparar la presión del aire con un valor introducido (<, ≤, =, ≠, ≥, >). El valor comparativo se inserta en el campo numérico al final del bloque. Este bloque se puede utilizar como condición. En el ejemplo, el motor se detiene cuando la presión del aire es superior a 10.

Termómetro
Acceso
Con el bloque obtención de la temperatura con el sensor medioambiental se puede medir la temperatura.
Consulta
Para consultar si se está midiendo una temperatura determinada se utiliza el bloque es la temperatura del sensor medioambiental [] ... El menú desplegable (triángulo pequeño) se puede utilizar para determinar cómo se debe comparar la temperatura con un valor introducido (<, ≤, =, ≠, ≥, >). El valor comparativo se inserta en el campo numérico al final del bloque. Este bloque se puede utilizar como condición. En el ejemplo, el motor se detiene cuando la temperatura es superior a 10.

Sensor de humedad del aire
Acceso
Con el bloque obtención de la humedad del aire con el sensor medioambiental se puede medir la humedad del aire.
Consulta
Para consultar si se está midiendo una humedad del aire determinada se utiliza el bloque es la humedad del aire del sensor medioambiental [] ... El menú desplegable (triángulo pequeño) se puede utilizar para determinar cómo se debe comparar la humedad del aire con un valor introducido (<, ≤, =, ≠, ≥, >). El valor comparativo se inserta en el campo numérico al final del bloque. Este bloque se puede utilizar como condición. En el ejemplo, el motor se detiene cuando la humedad del aire es superior a 10.
