
Motor
Arranque de cada bloque
El El arranque de cada bloque ofrece la posibilidad de ejecutar un programa si se cumple una condición. Funciona de manera similar a la distinción de casos, pero no se ejecuta solo una vez, sino cada vez que se cumple la condición durante todo el transcurso del programa. Arranque de cada bloque:
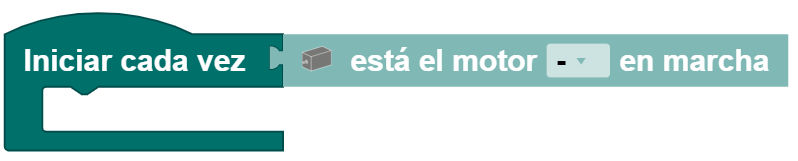
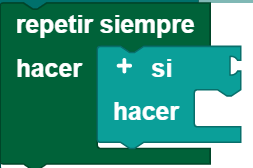
Es una abreviatura del siguiente constructo:
Se pueden utilizar todas las condiciones de esta categoría en el el Arranque de cada bloque bloque de la categoría Motor.
Nota: La sección del programa dentro de Arranque de cada bloque debe ser corta y no contener llamadas de bloqueo ni bucles sin fin, de modo que esta parte del programa se pueda procesar rápidamente.
Motor Motor
El icono en los bloques del motor representa todos los motores que no son codificadores ni servomotores.
Configuración
Con el bloque bloque configuración de la velocidad del motor en [] ... se puede configurar la velocidad de un motor en un valor determinado (desde 0 hasta 512). En el menú desplegable (triángulo pequeño) se puede seleccionar el sentido de rotación.
Acceso
Con el bloque bloque obtención de la velocidad del motor motor se puede acceder a la velocidad del motor y procesarla como valor.
Consulta
Con los bloques bloques el motor está funcionando funcionando y y la velocidad del motor es ... se puede configurar la actividad o la velocidad de un motor como un estado.
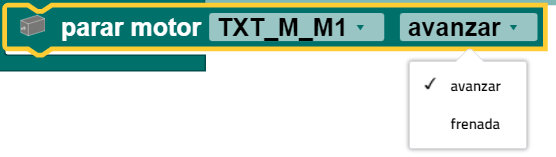
Detención
Con el bloque bloque detención del motor [] es posible parar un motor. Para ello, el bloque bloque detención del motor [] ofrece opciones para detener un motor directamente o de esperar a que se agote. La opción deseada se puede seleccionar utilizando el menú desplegable (triángulo pequeño):
Servomotor
Configuración
Con el bloque bloque configuración de la posición en ... se puede configurar la posición de un servomotor en un valor determinado (desde 0 hasta 512). 0 y 512 son los valores de la desviación máxima hacia la derecha y hacia la izquierda. Por consiguiente, con el valor 256 el servomotor se encuentra en la parte central.
Acceso
Con el bloque bloque acceder a la posición n se puede acceder a la posición de un servomotor y procesarla como valor.
Motor codificador

El motor codificador tiene las mismas funciones que un motor normal, pero también ofrece la opción de contar las revoluciones y de controlar diferentes motores de manera sincronizada. Una revolución se divide en ~ 64 pasos.
Configuración
Con el bloque bloque

se puede configurar la velocidad de un motor en un valor determinado (de 0 a 512). En el menú desplegable (triángulo pequeño) se puede seleccionar el sentido de rotación. Además, puede introducir el número de pasos que debe recorrer el motor. En este ejemplo, el motor gira 100 pasos, es decir, una revolución y un tercio. Como se puede ver en el ejemplo, este bloque tiene un signo +, y a través de él se pueden controlar diferentes motores de forma sincronizada. Es posible sincronizar motores en el maestro o en una extensión pero no se puede realizar una sincronización general entre los motores del maestro y una extensión.
Nota: las llamadas de sincronización que se suceden rápidamente, como las que permite un bucle (véase el ejemplo), pueden perjudicar la sincronización o incluso impedirla por completo.
Detención
El motor se puede parar utilizando el bloque bloque detención del motor …. Si se desea detener más de un motor al mismo tiempo, se pueden añadir hasta tres motores adicionales mediante el signo + que se encuentra a la izquierda del bloque.
Consulta
El bloque bloque se ha obtenido la posición se utiliza para usar la posición alcanzada como condición. En este caso, posición hace referencia a la posición final de un motor codificador después de haber completado la amplitud de paso.