
Motor
Het blok Start elke keer
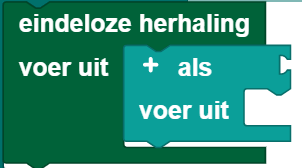
Het blok blok Start elke keer biedt de mogelijkheid om een programma te laten draaien, wanneer aan een voorwaarde is voldaan. Dit werkt dus net als een verschil tussen gevallen, maar wordt tijdens het gehele verloop van het programma niet slechts eenmaal doorlopen, maar elke keer wanneer aan de voorwaarde wordt voldaan. Het blok blok Start elke keer:

is een afkorting voor onderstaande constructie:
Je kunt in het blok blok Start elke keer keer van de categorie Motor alle voorwaarden uit juist deze categorie gebruiken.
Aanwijzing: Het programmagedeelte van het blok Start elke keer moet kort worden gehouden en mag geen blokkerende openingshandelingen of eindeloze loops bevatten, zodat dit deel van het programma snel kan worden afgewerkt.
Motor Motor
Het symbool op de motorblokken is plaatsvervangend voor alle motoren, die geen encoder- of servomotoren zijn.
Instellen
Met het blok blok stel motortoerental in op [] … kun je het toerental van een motor op een bepaalde waarde (van 0 tot 512) instellen. Via het dropdown-menu (klein driehoekje) kan de draairichting worden geselecteerd.
Openen
Met het blok blok haal motortoerental motortoerental kan het toerental van een motor geopend en als waarde verder verwerkt worden.
Opvragen
Met de blokken blokken draait motor motor en en is motortoerental ... kun je de activiteit respectievelijk het toerental van een motor als voorwaarde gebruiken.
Stoppen
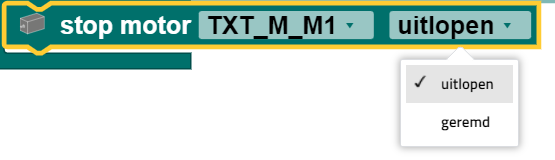
Met het blok blok stop motor [] is het mogelijk om een motor te stoppen. Daarbij biedt het blok blok stop motor [] de opties om een motor direct of geleidelijk tot stilstand te brengen. De gewenste optie kun je via het dropdown-menu (klein driehoekje) kiezen:
Servomotor
Instellen
Met het blok blok stel stand op … in in kun je de stand van een motor op een bepaalde waarde (van 0 tot 512) instellen. 0 en 512 zijn de waarden voor de maximale uitslag naar rechts en links. Bij de waarde 256 staat de servomotor dienovereenkomstig in het midden.
Openen
Met het blok blok open stand stand kan de stand van een servomotor geopend en als waarde verder verwerkt worden.
Encodermotor

De encodermotor heeft dezelfde functie als een normale motor, maar heeft bovendien de mogelijkheid om het aantal omwentelingen te tellen en meerdere motoren synchroon aan te sturen. Een omwenteling wordt daarbij in ~64 stappen onderverdeeld.
Instellen
Met het blok blok

kan het toerental van een motor op een bepaalde waarde (van 0-512) worden ingesteld. Via het dropdown-menu (klein driehoekje) kan de draairichting worden geselecteerd. Bovendien kan het aantal stappen worden ingevoerd, die de motor moet afleggen. In dit voorbeeld draait de motor 100 stappen, dus één en een derde omwenteling. Zoals in het voorbeeld is te zien heeft dit blok een plusteken, met behulp waarvan meerdere motoren synchroon kunnen worden aangestuurd. Het is mogelijk om motoren aan de hand van een master of een extensie te synchroniseren, een overkoepelende synchronisatie bijv. tussen motoren van de master en een extensie is niet mogelijk.
Aanwijzing: Snel opeenvolgende synchronisatieprocessen, zoals bijv. door een loop mogelijk zijn (zie voorbeeld), kunnen de synchroniteit beïnvloeden of zelfs compleet verhinderen.
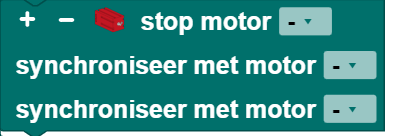
Stoppen
Met het blok blok stop motor … wordt een motor gestopt. Wil je meerdere motoren gelijktijdig stoppen, dan kun je met het linker plusteken in het blok maximaal drie andere motoren toevoegen.
Opvragen
Het blok blok heeft de positie bereikt wordt gebruikt om het bereiken van de positie als voorwaarde te gebruiken. Met positie wordt hier de eindpositie van een encodermotor na een volledig beëindigde stap bedoeld.